6月初 ,“青创北京”2023年“挑战杯”首都大学生课外学术科技作品竞赛和各大菠菜网入口第三十三届冯如杯竞赛落下帷幕。自动化学院学子一鼓作气,表现优异,最终取得学院参赛史上最好成绩,荣获“青创北京”2023年“挑战杯”首都大学生课外学术科技作品竞赛特等奖3项(主赛道1项、黑科技专项赛2项)、二等奖2项、三等奖3项,各大菠菜网入口第三十三届冯如杯竞赛——主赛道一等奖4项、二等奖6项、三等奖9项,红旅赛道银奖1项、铜奖2项。

(一)“挑战杯”主体赛
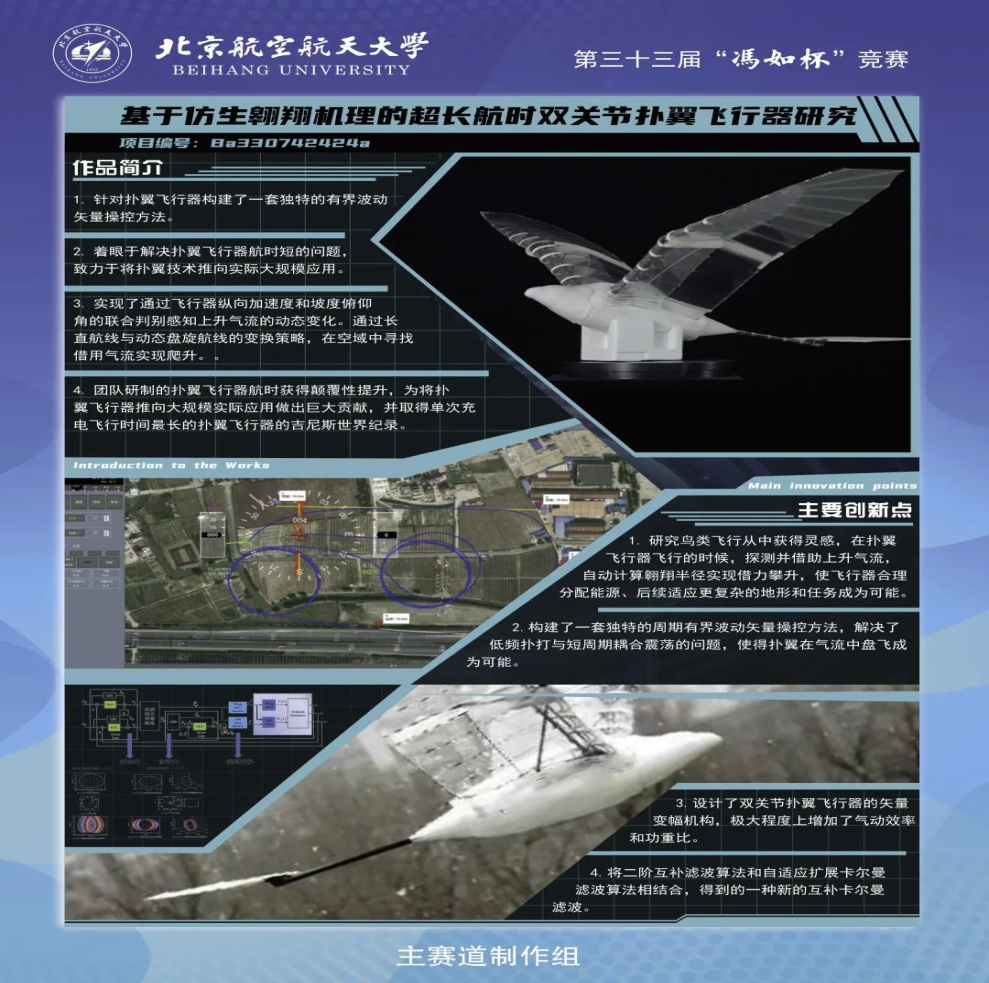
项目名称:超长航时双关节扑翼飞行器
项目成员:王筱然,毛睿扬
项目指导老师:赵龙飞
项目简介:续航短与操控难一直限制扑翼机投入实际应用的瓶颈。我们团队对扑翼平台进行整体优 化,攻克了扑翼振动下的惯导感知问题,解决了周期波动飞行下的强鲁棒姿态控制问题。同时 我们从鸟类御风翱翔现象中获得了提升扑翼机续航的灵感,完整设计并实现了"驭风"策略,大幅提升飞行任务时间,成功创造国际上首个扑翼类续航纪录。
(二)“挑战杯”黑科技专项赛
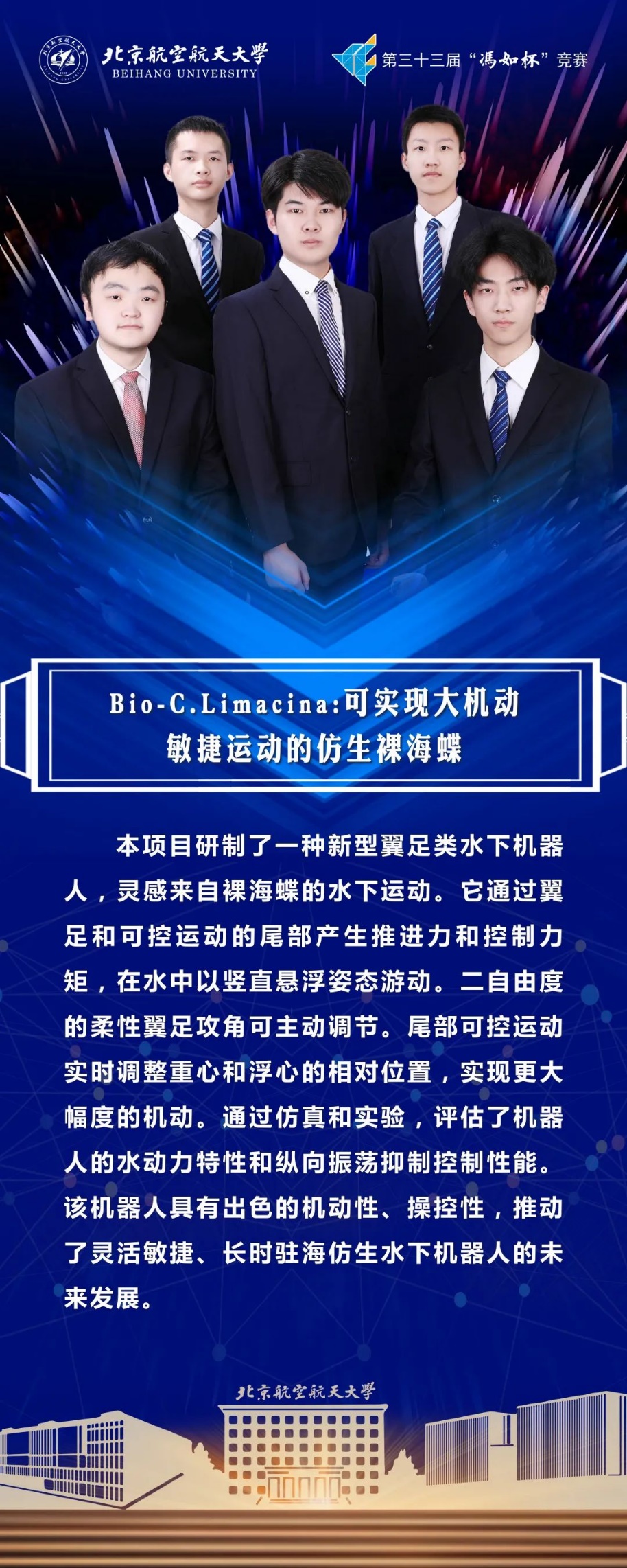
项目名称:仿裸海蝶新型翼足水下机器人
项目成员:赵金昊 周周航 冯元莅 万文静 阎进可 靳思远
指导教师:王少萍 张益鑫
项目简介:本项目研制了一种仿裸海蝶的新型翼足水下机器人。创新设计了翼足和尾部结构,协同控制产生推进力实现水中竖直悬浮游动;主动调节柔性翼足攻角和实时调整尾部运动改变重心和浮心相对位置,实现大机动旋转。仿真和实验证明该机器人具有出色的敏捷机动特性和抗干扰能力,为设计长时驻海、灵活机动仿生水下机器人提供了新思路。
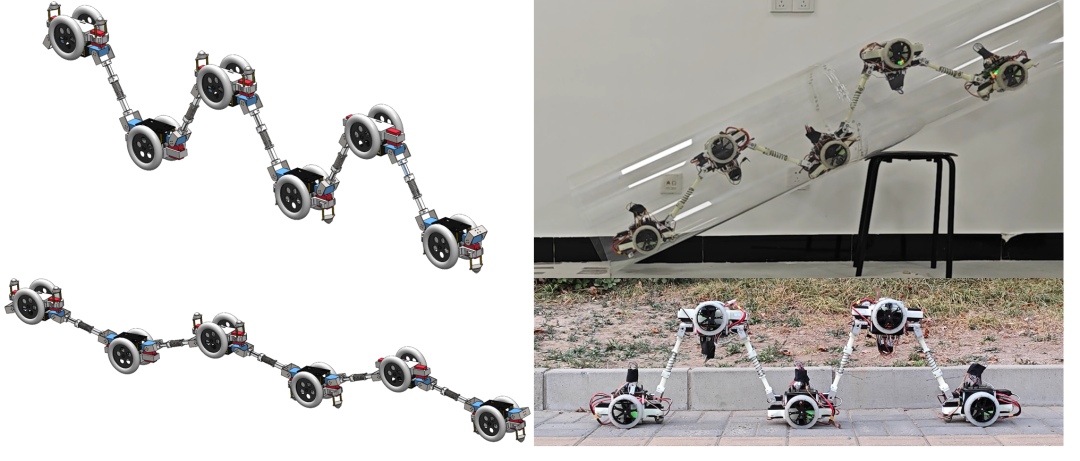
项目名称:RoboChain串联管道检测机器人
团队成员:王璐、陈 汉励、付子豪、刘蔚文沛、吕新月、黎明悦
指导教师:张益鑫、王少萍
项目介绍:RoboChain是 一 种串联管道检测机器人,创新设计了 一 种轮簧杆单体结构,可以根据实际需要通过手风琴连接模式构成多体机器人;提出 一 种新型的轮杆协同控制模式,使机器人能够完成转向、变形等功能;通过电磁的吸合和分离,实现多体结构的分割和单体结构自适应重构,实现复杂管道的自适应变形,提高对复杂管道网络的检测效率。
(三)北航冯如杯竞赛
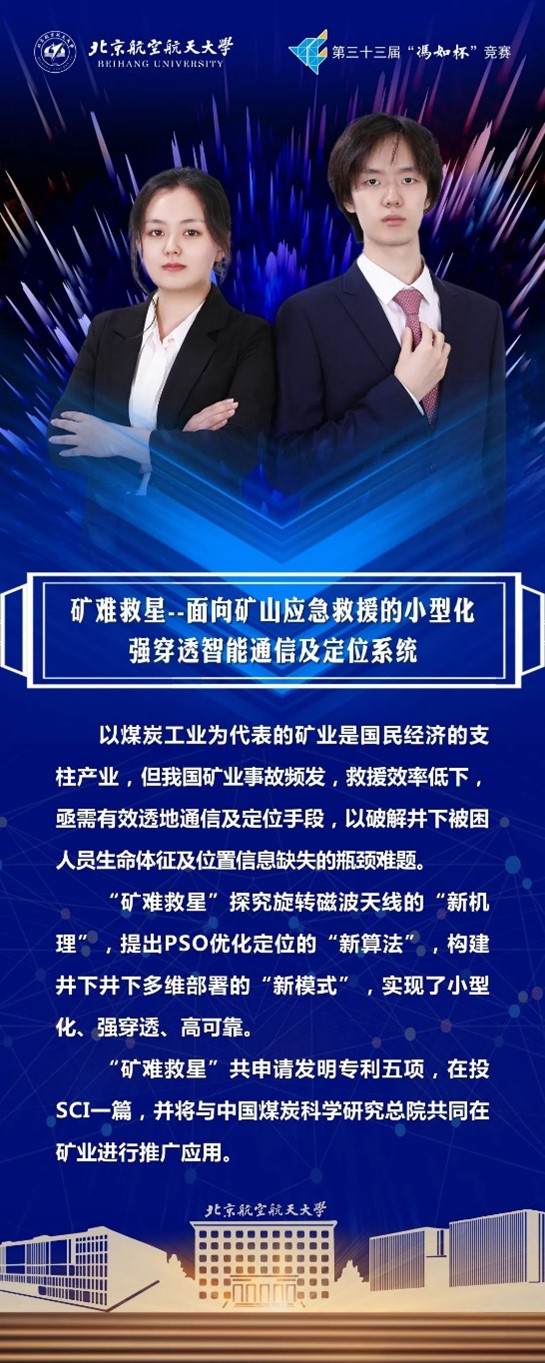
项目名称:矿难救星
团队成员:朱映臻 贾慧姝
项目简介:以煤炭工业为代表的矿业是国民经济的支柱产业,但我国矿业事故频发,救援效率低下,亟需有效透地通信及定位手段,以破解井下被困人员生命体征及位置信息缺失的瓶颈难题。"矿难救星"探究旋转磁波天线的"新机理",提出PSO优化定位的"新算法",构建井下井下多维部署的"新模式",实现了小型化、强穿透、高可靠。"矿难救星"共申请发明专利3项,获33届冯如杯主赛道制作组一等奖,与煤炭科学研究总院达成合作意向。
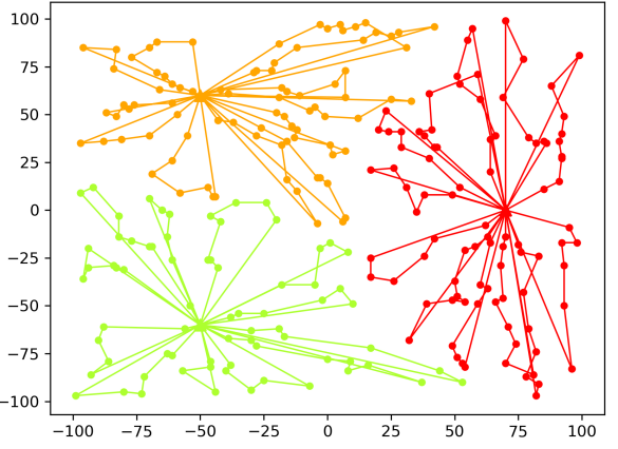
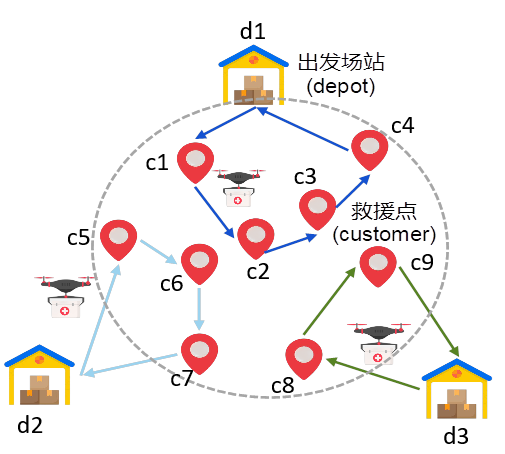
项目名称:基于大规模分治策略的多场站无人机应急救援优化方法
项目成员:苏立晨
项目简介:近年来,受极端天气影响,全球自然灾害发生频率显著增加。自然灾害发生后,受灾地区 需要大规模的应急救援物资,及时的物资供应链是应急救灾的生命线。灾后应急物资投送任务 具有救援时间紧迫度高、待救援点规模大等特点,亟需高效的应急物资投送方案,且无人机在任务和平台的多种耦合关系导致现有求解方法寻优迟缓,难以满足应急救援任务强时效性需求。因此本文建立了多场站无人机应急救援模型,提出了基于路径相似度的大规模动态分治策略和自适应扰动邻域的变邻域搜索算法,实现了大规模应急投送方案的高效寻优,仿真验证了本方法能够有效改善应急投送的时间裕度。
答辩展台旁,校领导与项目参赛同学进行亲切交流并给予肯定和支持。


不管结果好坏,各参赛选手都为自己的项目投入了大量时间和汗水,同样值得敬佩和学习,再次恭喜所有获奖团队!同时也希望更多同学可以参与到各类型的双创赛事,提高创新能力,培养挑战精神,积极将所学知识与科研项目以更加丰富的形式转化为创新创业成果,展现3系学子的风采!



